Orbit
O modo de voo "Orbit (Órbita)" é suportado por todos os drones DJI, exceto Spark.
A órbita faz com que a aeronave circule em torno de um ponto de interesse, ao mesmo tempo em que o Gimbal mantém o foco nela. Os parâmetros da órbita (raio, altitude, velocidade) podem ser alterados em tempo real.
Acesse o modo "Orbit" pressionando o ícone do modo de voo na parte superior esquerda da tela Litchi. Selecione "Orbit".
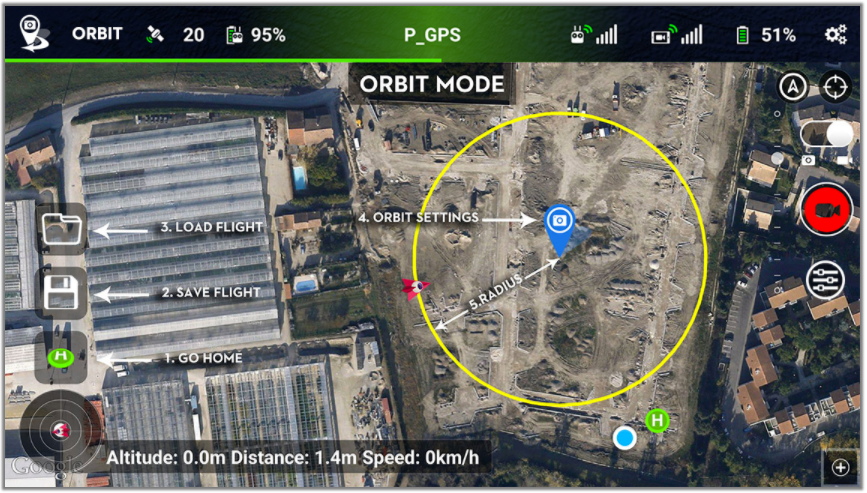
- Go Home (Ir para casa - apenas para Android): toque para iniciar o modo Return to Home a qualquer momento. Essa função também pode ser ativada usando o controle remoto.
- Save Flight (Salvar voo): toque para salvar os parâmetros de órbita atuais.
- Load Fligth (Carregar voo): toque para carregar um voo em órbita previamente salvo.
- Orbit Settings (Configurações de órbita): toque na tela para marcar o ponto de interesse. Depois será possível exibir a janela de configurações da órbita (detalhes abaixo).
- Radius (Raio): o círculo da órbita é exibido no mapa com uma linha amarela. Esse parâmetro pode ser atualizado em tempo real se você o alterar durante uma sessão de órbita.
Orbit Settings
Para exibir a janela de configurações da órbita, coloque um marcador de ponto de interesse no mapa, pressionando o local.
- Altitude: a altitude em que a aeronave deve orbitar. Pode ser alterado em tempo real usando o joystick esquerdo para cima / para baixo (modo 2).
- Radius (Raio): a distância a partir da qual a aeronave deve orbitar do ponto de interesse. Pode ser alterado em tempo real usando o joystick direito (modo 2). Empurre o joystick para cima para reduzir o raio ou para baixo para aumentar o raio.
- Speed: a velocidade na qual a aeronave deve orbitar em graus por segundo. A velocidade máxima selecionável variará de acordo com o raio selecionado. Pode ser alterado em tempo real usando o joystick direito (modo 2). Empurre o joystick para a direita para aumentar a velocidade no sentido horário, empurre-o para a esquerda para aumentar a velocidade anti-horária.
Entry Point: o ponto no círculo onde a aeronave começará a orbitar. Por favor, note que o mapa está orientado para o Norte por padrão.
Importante Certifique-se de que não haja obstáculos entre o ponto de entrada e a posição inicial da aeronave.
Heading Mode: define a orientação da aeronave enquanto está em órbita. Pode ser configurado para "Centro", "Ao longo do círculo (Avançar)", "Ao longo do círculo (Para trás)", "Para fora" ou "Controlado pelo usuário (Manual)". O título pode ser alterado em tempo real usando o joystick esquerdo (modo 2). Empurre o joystick para a esquerda para virar à esquerda e para a direita para girar à direita.
Direction (Rotation): Define o sentido de movimento da órbita: horário ou anti-horário.
Gimbal Control (auto/manual - auto by default): Quando configurado como automático (automático), faz com que o Gimbal aponte no centro da órbita automaticamente. Se a opção estiver configurada como manual, o usuário será obrigado a controlar o Gimbal manualmente.
Subject Height: altura do objeto da órbita para a qual a câmera deve apontar. Se o "Gimbal Control" estiver configurado para auto, use a roda de ajuste do Gimbal do RC para ajustar a altura do objeto durante execução da órbita.
Running an Orbit session
Pressione o botão "Start (Iniciar)" na parte inferior da tela de configurações para iniciar uma execução de órbita.
Quando iniciado, a aeronave primeiro subirá para a altitude predefinida e depois se deslocará para o ponto de entrada no círculo da órbita. Em seguida, ele começará a execução da órbita.
Se a aeronave estiver pousada, ao iniciar a execução da órbita, ela só irá decolar se a configuração geral de "decolagem automática" estiver ativada.
Stopping Orbit
Para interromper a execução de uma órbita, pressione o botão vermelho de "Stop" na barra de botões esquerda.
Failsafe
Se o sinal for perdido entre a aeronave e o dispositivo móvel, a aeronave continuará orbitando até atingir o nível crítico da bateria. Em seguida, iniciará o procedimento de pouso automaticamente, mesmo se o FailSafe esteja configurado como retornar para casa.
Vídeos de Exemplo
